
 En
En
Fragen Sie sich jetzt an






Nachricht

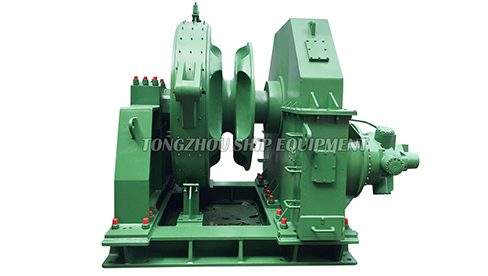
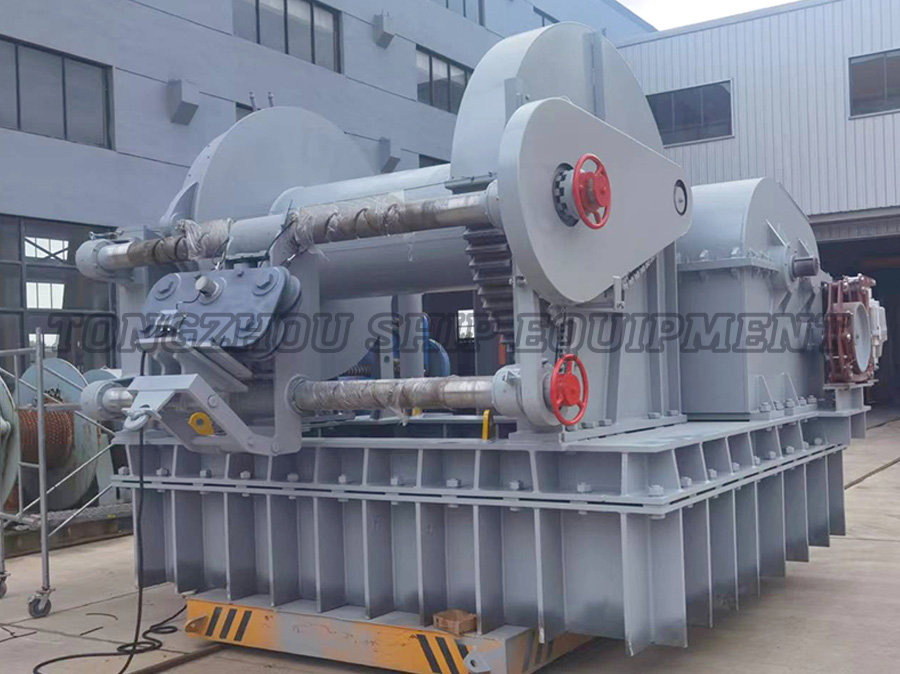
Wie funktioniert eine hydraulische Ankerwinde?
 2025.09.12
2025.09.12
 Branchennachrichten
Branchennachrichten
Die Funktionsweise eines hydraulische Ankerwinde beginnt mit einer Stromquelle, typischerweise dem Hauptmotoder des Schiffes oder einem speziellen Hilfsmotor. Dieser Motor treibt eine Hydraulikpumpe an, die das Herzstück des Systems bildet. Die Pumpe wandelt mechanische Energie in hydraulische Energie um, indem sie eine spezielle Ölflüssigkeit unter Druck setzt. Diese Hochdruckflüssigkeit wird dann durch verstärkte Schläuche zu einem Hydraulikmotor geleitet, der in der Ankerwindeneinheit montiert ist.
Schlüsselkomponenten und ihre Funktionen
-
Hydraulikpumpe: Die Pumpe befindet sich in der Nähe des Schiffsmotors und erzeugt den Durchfluss und Druck, der zum Antrieb des Systems erforderlich ist. Dabei handelt es sich häufig um eine Pumpe mit variablem Hubraum, die es dem Bediener ermöglicht, die Drehzahl und das Drehmoment der Ankerwinde durch Anpassen des Flüssigkeitsflusses zu steuern.
-
Hydraulikmotor: Das unter Druck stehende Fluid der Pumpe wird zum Hydraulikmotor geleitet. Dieser Motor fungiert als Antriebskraft der Ankerwinde und wandelt die hydraulische Energie wieder in mechanische Rotation um. Das vom Motor erzeugte Drehmoment ist deutlich hoch, was für das Heben des immensen Gewichts eines Ankers und seiner Kette unerlässlich ist.
-
Getriebe: Die Drehkraft des Hydraulikmotors wird in ein Untersetzungsgetriebe eingespeist. Dieses Getriebe reduziert die hohe Drehzahl des Motors auf eine viel niedrigere, stärkere Ausgangsdrehzahl und erhöht so das an der Ankerwindenwelle verfügbare Drehmoment.
-
Kettenrad (Zigeuner) und Warping Drum: Die Abtriebswelle des Getriebes treibt eine oder zwei Schlüsselkomponenten an:
-
Die Kettenrad or Zigeuner ist ein Speichenrad mit geformten Taschen, die in die Glieder der Ankerkette eingreifen. Während es sich dreht, zieht es die Kette ein oder biegt sie aus.
-
Die Ketttrommel ist ein glatter Lauf, der zur Handhabung von Festmacherleinen oder Seilen verwendet wird.
-
-
Kupplung und Bremse: Zum Lösen des Kettenrads vom Antriebsstrang ist eine mechanische Kupplung vorgesehen. Dadurch kann die Besatzung das Kettenrad für den manuellen Betrieb freilaufen lassen oder den Anker unter seinem eigenen Gewicht laufen lassen. Am Kettenrad ist ein separates Bremsband angebracht, um die Sinkgeschwindigkeit während der Verankerung zu steuern und Anker und Kette nach dem Ausfahren sicher an Ort und Stelle zu halten.
Der operative Workflow
Der Prozess des Ankertransports umfasst eine koordinierte Reihenfolge:
-
Engagement: Der Bediener betätigt die mechanische Kupplung, um das Kettenrad mit dem Antriebssystem zu verbinden.
-
Steuerung: Von einer Fernbedienungsstation aus aktiviert der Bediener das Hydrauliksystem. Durch Bewegen des Steuerhebels wird unter Druck stehende Flüssigkeit zum Hydraulikmotor geleitet, wodurch dieser rotiert.
-
Transport: Der Motor dreht das Getriebe, das das Kettenrad antreibt. Das Kettenrad greift die Kette, zieht sie hinein und hebt den Anker vom Meeresboden.
-
Stauung: Sobald der Anker frei vom Wasser ist und im Klüverrohr befestigt ist, wird die Bremse betätigt und die Kupplung ausgekuppelt.
-
Auszahlung: Um den Anker abzusenken, wird die Kupplung eingerückt und die Bremse vorsichtig und kontrolliert gelöst, sodass das Gewicht des Ankers und der Kette den Motor antreiben kann, der nun als Pumpe fungiert. Die Überdruckventile des Systems regeln den Gegendruck, um die Sinkgeschwindigkeit zu steuern.
Vorteile eines Hydrauliksystems
Die hydraulische Ankerwinde bietet mehrere inhärente Vorteile. Der Hydraulikmotor ist von Natur aus von seiner Umgebung abgedichtet und daher äußerst widerstandsfähig gegen Korrosion und eindringendes Wasser. Das System liefert selbst bei sehr niedrigen Drehzahlen eine gleichmäßige, kontinuierliche Leistung mit hohem Drehmoment, was für eine kontrollierte und sichere Verankerung entscheidend ist. Die hydraulischen Komponenten können von der Ankerwinde selbst entfernt angeordnet werden, was eine kompakte Deckeinheit und eine flexible Installation ermöglicht. Darüber hinaus schützt der Einsatz von Überdruckventilen das System vor Überlastungen und verhindert so Schäden während des Betriebs.
Eine hydraulische Ankerwinde funktioniert, indem sie die Motorleistung in einen kontrollierten Hydraulikdruck umwandelt, der einen Motor antreibt, um die mechanische Kraft mit hohem Drehmoment und niedriger Geschwindigkeit bereitzustellen, die zur Bewältigung schwerer Bodengeräte erforderlich ist. Bei seinem Design stehen Leistung, Kontrolle und Haltbarkeit im Vordergrund, was es zu einem Standard- und vertrauenswürdigen System auf einer Vielzahl von Seeschiffen macht.











-
Unternehmens -E -Mail:
-
Verkaufs -E -Mail:
-
Adresse:Nr. 16 Keshg Road, Entwicklungszone, Stadt Xinghua, Provinz Jiangsu, China



